Loading...
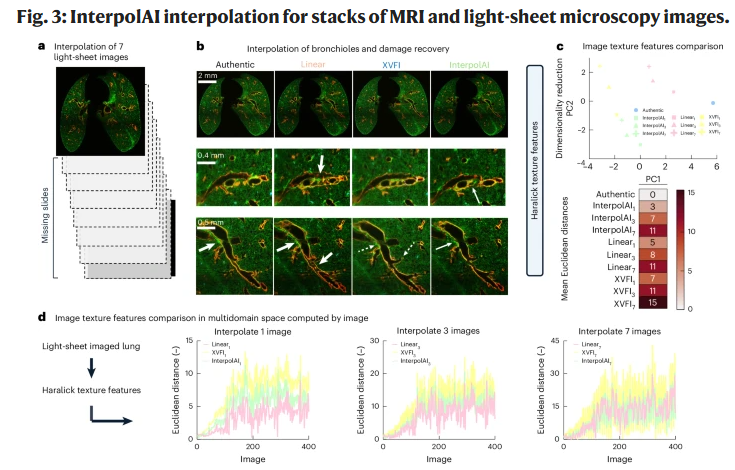
5月28日《Nature Methods》介绍了一项技术——InterpolAI,能够利用深度学习(de...
为了对cellpose微调模型在测试数据集上的效果进行评估,在Grok的帮助下弄了一个小工具。
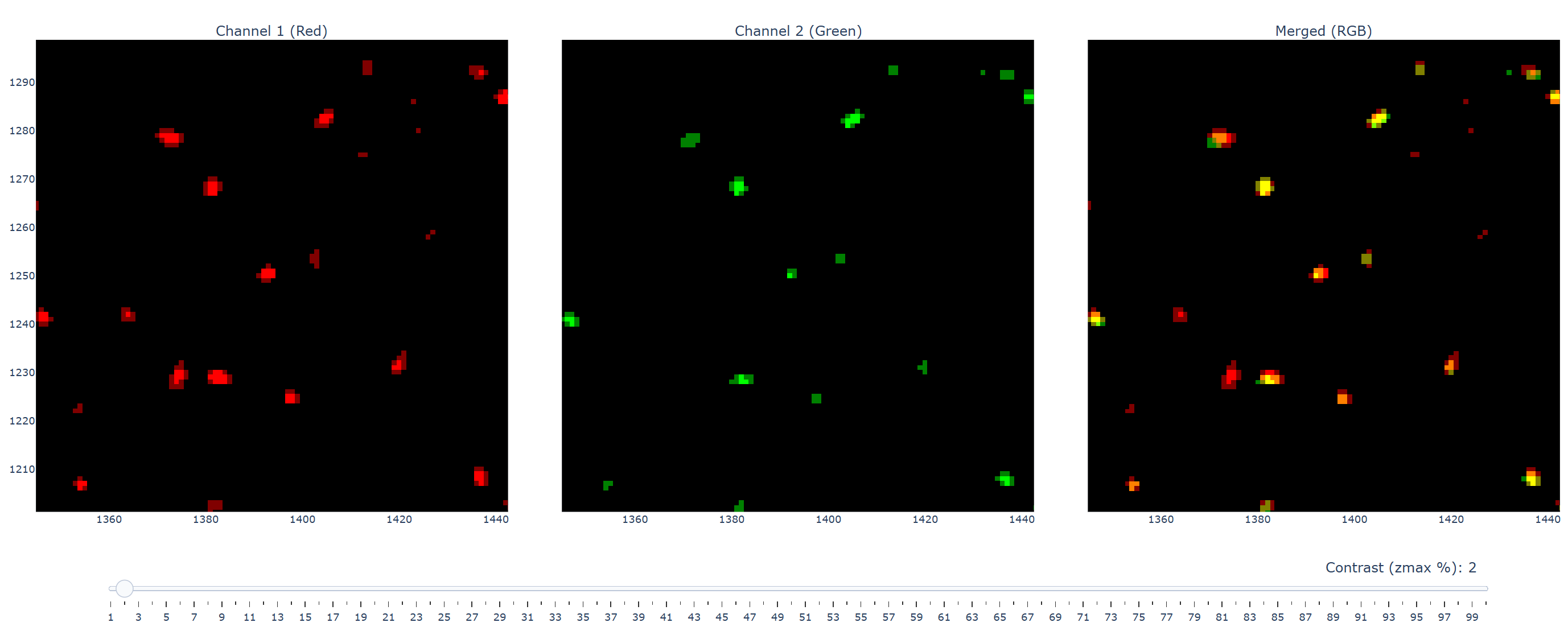
在grok的帮助下利用plotly打造了一个简单的双通道成像预览函数。这样可以方便集成到数据分析工作流程...
记录三维点云配准的经典Iterative Closest Point(ICP)算法。
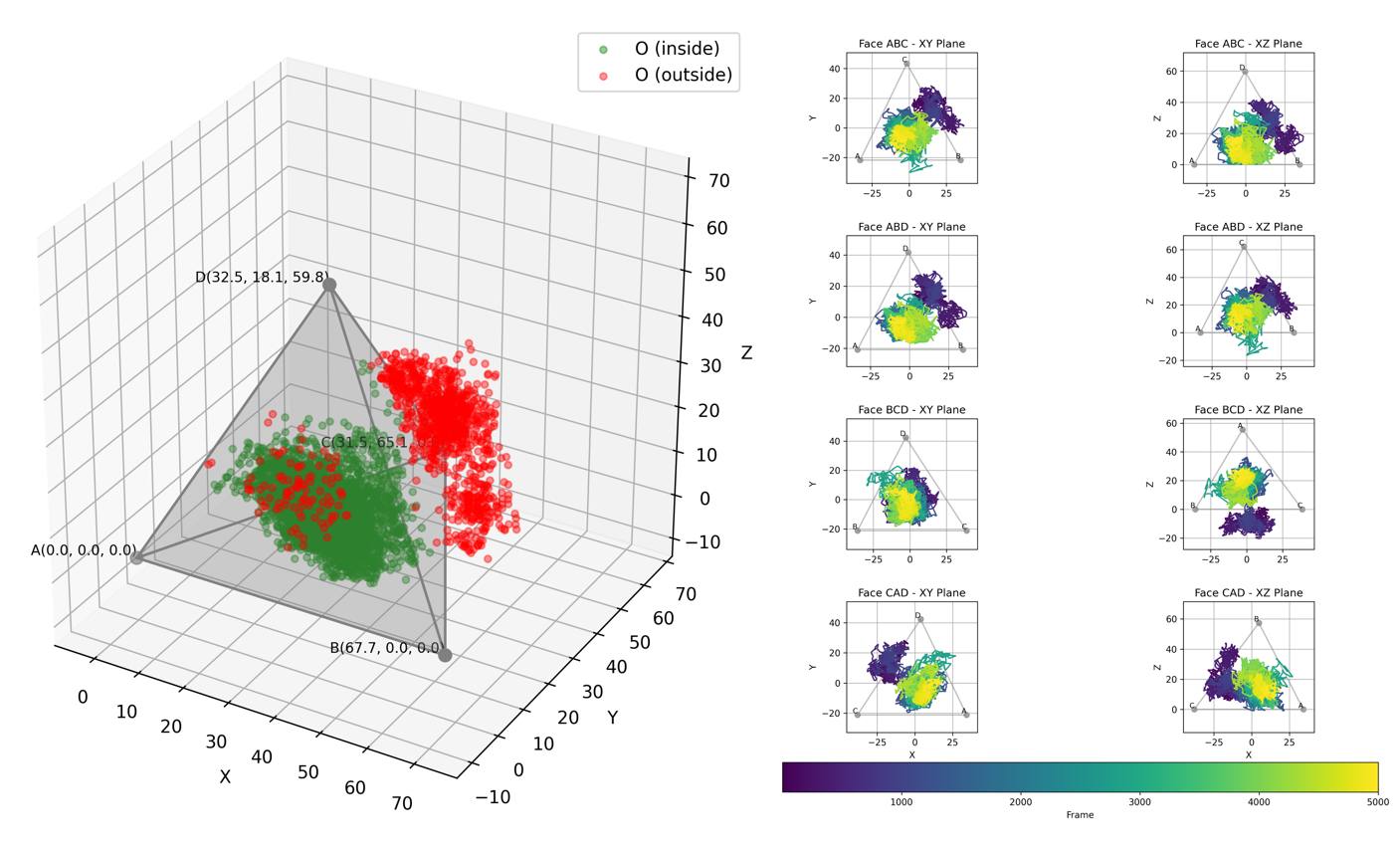
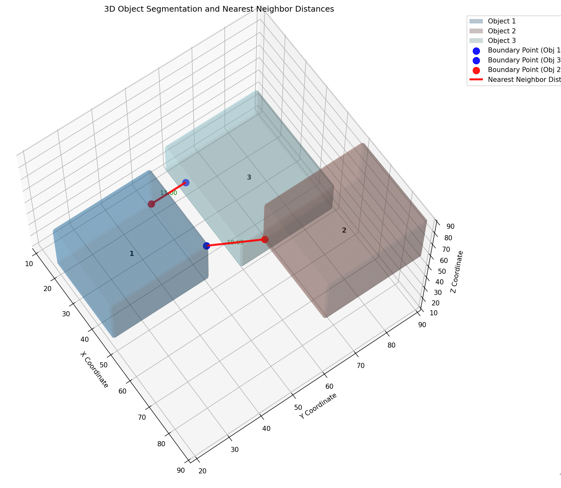
要判断一个东西是否在一个三维区域的内部还是外部是很简单的,但是要直观地展示出来这种三维空间的内外关系,需...
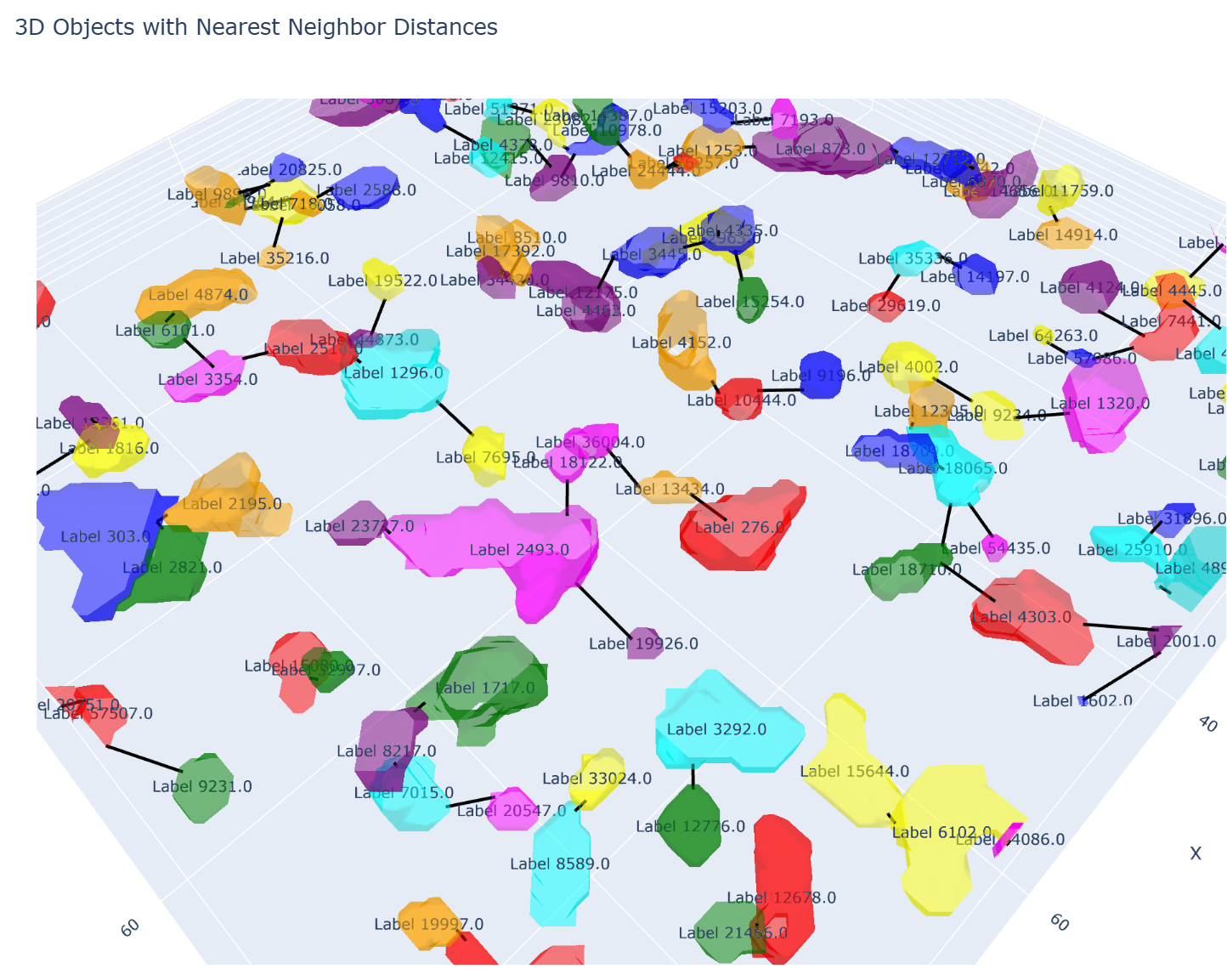
之前想写一个函数来计算一个三维物体的最邻近间隙距离并进行可视化。发现Grok提供的代码最简洁,可视化效果...
对于很小的信号点比如单分子光斑,或者是单分子定位的散点cluster,我们可以忽略其本身的体积,视作质点...
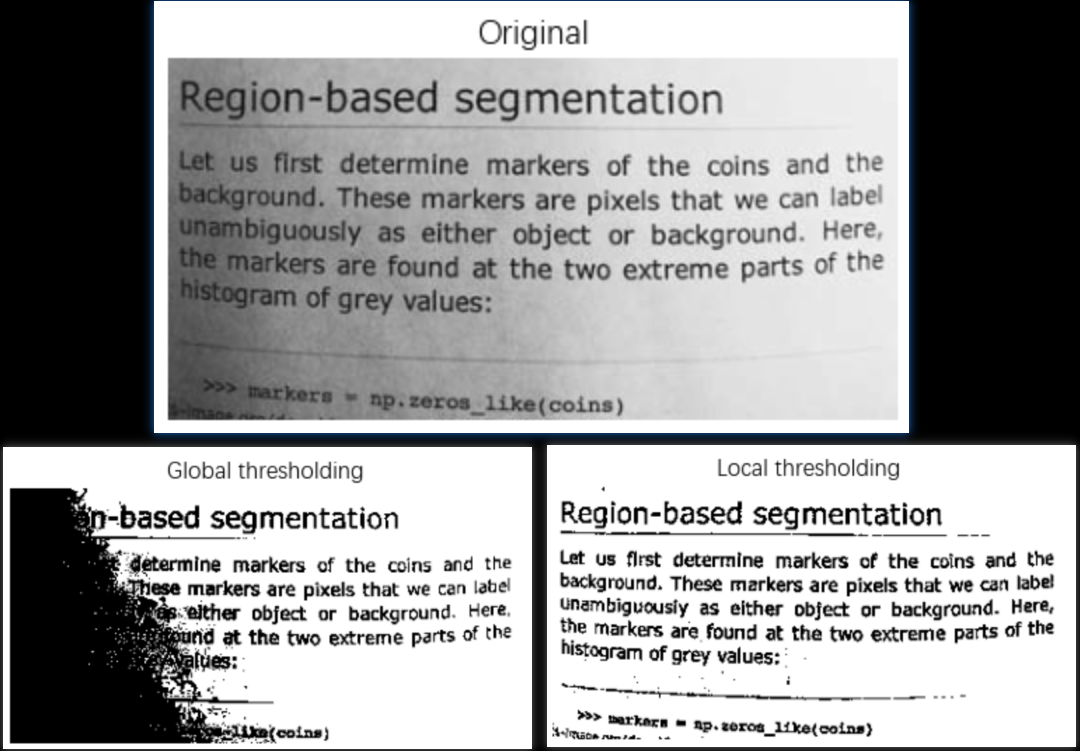
像threshold_otsu或者threshold_li等方法得到的阈值就是一个数值,然后得应用到全局...