在多通道成像的时候,由于各种原因可能存在需要配准的情况。这里介绍一种最简单的刚性配准方式。
首先,在 ImageJ 中,使用 MultiPoint选择工具,将两个通道的图像中相匹配的特征点(比如多色荧光小球的信号点)选中,然后分别保存它们的ROI记录。在 python 中可以通过如下代码读取ROI记录并获取坐标:
import roifilea = roifile.roiread("a.roi")b = roifile.roiread("b.roi")src = a.coordinates()dst = b.coordinates()然后通过下面的代码计算平面旋转矩阵和平移向量:
import numpy as np
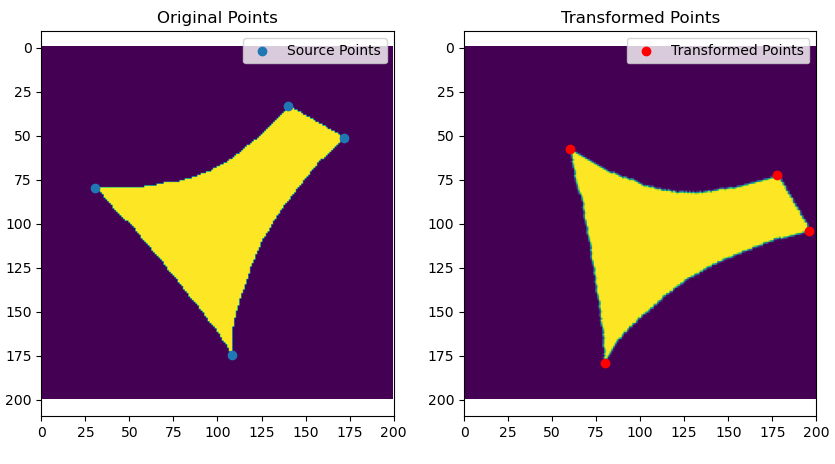
def compute_rotation_translation(a_points, b_points): # 计算质心 a_center = np.mean(a_points, axis=0) b_center = np.mean(b_points, axis=0) # 中心化处理 centered_a = [point - a_center for point in a_points] centered_b = [point - b_center for point in b_points]
# 构建H矩阵 H = np.zeros((2, 2)) for a, b in zip(centered_a, centered_b): outer_product = np.array(a).reshape(-1, 1) @ np.array(b).reshape(1, -1) H += outer_product # SVD分解 U, _, Vt = np.linalg.svd(H) # 计算从a到b的旋转矩阵R,并确保行列式为1 R = Vt.T @ U det_R = np.linalg.det(R) if not np.isclose(det_R, 1.0): Vt[1] *= -1 R = Vt.T @ U # 计算从a到b的平移向量t t = b_center - R @ a_center return R, t
R, t = compute_rotation_translation(a_points=src, b_points=dst)对于普通用户,旋转矩阵可能并不直观,可以通过以下方法转换为角度:
assert (np.linalg.det(R)-1)<1e-3# 旋转矩阵的行列式为1,则为纯旋转矩阵,此时才能计算角度,否则需要归一化。# 计算角度。默认是从a到b顺时针angle_radians = np.arctan2(R[1, 0], R[0, 0])angle_degrees = np.degrees(angle_radians)print(f"旋转角度:{angle_degrees}度")然后是基于计算出来的旋转矩阵和平移向量,构建仿射变换矩阵,并应用于图像a,使之与b对齐:
import cv2
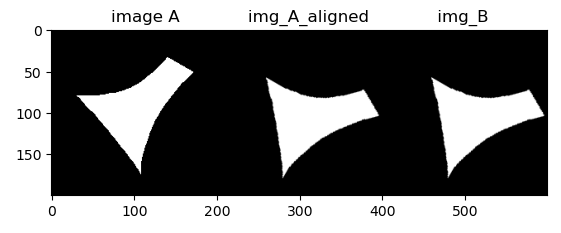
M = np.array([[R[0][0], R[0][1], t[0]], [R[1][0], R[1][2], t[1]], [0,0,1], ])img_A = cv2.imread('a.tif')img_B = cv2.imread("b.tif")img_A_aligned = cv2.warpAffine(img_A, M[:2], (img_A.shape[1], img_A.shape[0]))
# 将两个图像水平拼接查看变换情况。combined = np.hstack((img_B, np.ones(img_A.shape), img_A_aligned))plt.imshow(combined)plt.show()结果如下: