记录三维点云配准的经典Iterative Closest Point(ICP)算法。
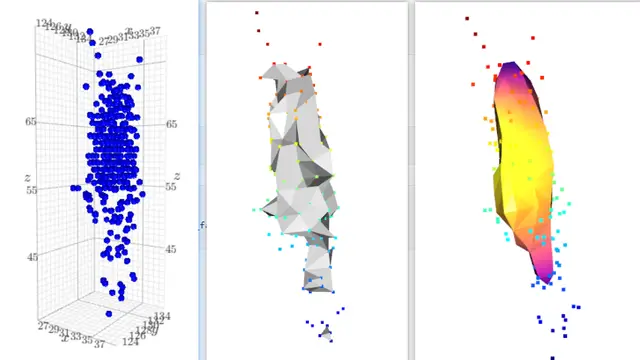
前面我们获得了PSF的点云数据,这里可以进一步通过 open3d 模块提供的泊松曲面重建功能来计算得到surface。
还没有符合条件的文章。